2024-cü il mayın 24-də Fizika və elektronika departamentinin dosenti Sevda Qəribovanın elmi rəhbərlik etdiyi magistr tələbələr Nicat Hacıyev və Rəhim Əhmədovun dissertasiya işlərinin ilkin müzakirəsi keçirildi və hazırladıqları prototip qurğular təqdim olundu.
Nicat Hacıyevin dissertasiya işi AVR mikrokontrolleri ilə sənaye “seç və yerləşdir” robot qolunun layihələndirilməsi (Designing industrial ‘‘pick and place’’ robotic arm with AVR microcontroller) idi. Modul və adaptiv quruluşa malik hazırlanmış robot qol, mövcud istehsal qurğularına asan inteqrasiya etməyə imkan verir. Robot qolun kinematikası və dinamikası, sürət, yük tutumu və məsafə daxil olmaqla müxtəlif məqsədlər üçün imkanlarının optimallaşdırılması dəqiq modelləşdirilib və simulyasiya edilmişdir. Robot öncədən proqramla yaddaşına verilmiş koordinatlardakı yükləri avtomatik olaraq götürür və digər koordinata yerləşdirir. Layihədə robot qolun yavaş hərəkətinə nail olunub, bu da öz növbəsində hərəkətin yüksək dəqiqliyini təmin edir və faydalı yüklərin zədələnməsinin qarşısını alır. Proqramlaşdırma ilə yavaşlama alqoritmi qolun sürətini azaltmaq üçün istifadə olunur. Təcrübədə robotun mühərrik və Arduino kontroller hissələri üçün cərəyanın, gərginliyin və eninə impuls modulyasiyasının qiymətləri ölçülüb və sınaqdan keçirilmişdir. Robotun nə qədər ağırlığa dözə biləcəyini müəyyən etmək üçün faydalı yükün kütləsi də ölçülmüş və müqayisə edilmişdir. Robot qolun alqoritmini həyata keçirmək və proqramlaşdırmaq üçün kontroller kimi Arduino Uno – dan istifadə olunub. Hərəkətin olduqca yavaşlamasına kodda bəzi dəyişiklikləri etməklə nail olunub. Kod Arduino IDE proqramında yazılıb. Yavaşlayan hərəkətin qrafiki Matlabdan istifadə edərək verilmişdir. Qollar arasındakı bucaqlar riyazi olaraq əks kinematika üsulu ilə hesablanmışdır.
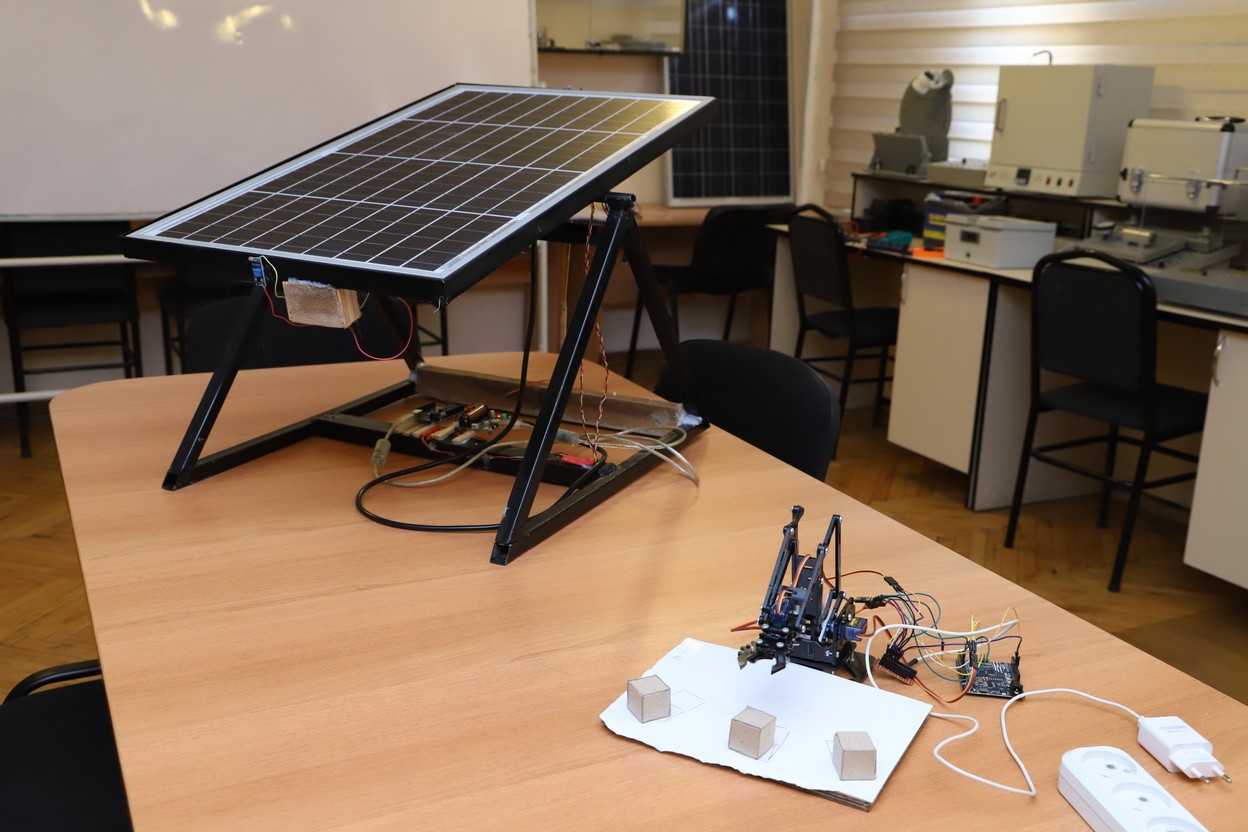
Rəhim Əhmədovun təqdim etdiyi dissertasiya işi isə Avtomatik günəş izləyicisi ilə telefon şarj çeviricisinin (Phone charging converter with automatic solar tacker) hazırlanması idi.
Avtomatik günəş izləyicisi ilə telefon şarj çeviricisi daha çox effektivlik əldə etmək məqsədilə dizayn edilmiş bir cihazdır. Cihazın əsas məqsədi günün istənilən saatında günəşin istiqamətini sensorlar vasitəsilə təyin etmək və paneli avtomatik olaraq hərəkətə gətirməkdir. Ümumiyyətlə, layihə 2 hissədən ibarətdir; Avtomatik günəş izləyicisi və telefon şarj çeviricisi. İşin əsas üstünlüyü, əl ilə daşına bilən olması, və əldə olunan enerjinin batareyada saxlanılaraq, daimi işlək vəziyyətdə olmasıdır. Layihə hazırlanan zaman ilk öncə günəş izləyicisinin avtomatikləşdirilməsi üçün mexaniki konstruksiya hazırlanmışdır. Daha sonra həmin konstruksiya üzərində telefon şarj çeviricisi yığılmışdır. İlk olaraq laboratoriya, daha sonra isə açıq hava şəraitlərində işləkliyi yoxlanılmışdır. Fərqli aylarda və müxtəlif hava şəraitlərində təcrübələr keçirilmiş və əsas parametrlər hesablanmışdır.











Copyright © Xəzər Universiteti, 2026
 Facebook
Facebook  Instagram
Instagram  X
X  LinkedIn
LinkedIn  Telegram
Telegram  YouTube
YouTube