On May 24, 2024, master's students Nijat Hajiyev and Rahim Ahmadov, under the supervision of Sevda Garibova, associate professor in the Department of Physics and Electronics, presented their dissertation predefense, showcasing their prototype devices. Nijat Hajiyev's dissertation, "Designing Industrial 'Pick and Place' Robotic Arm with AVR Microcontroller," focused on creating a robotic arm with a modular and adaptable design for seamless integration into current production setups.
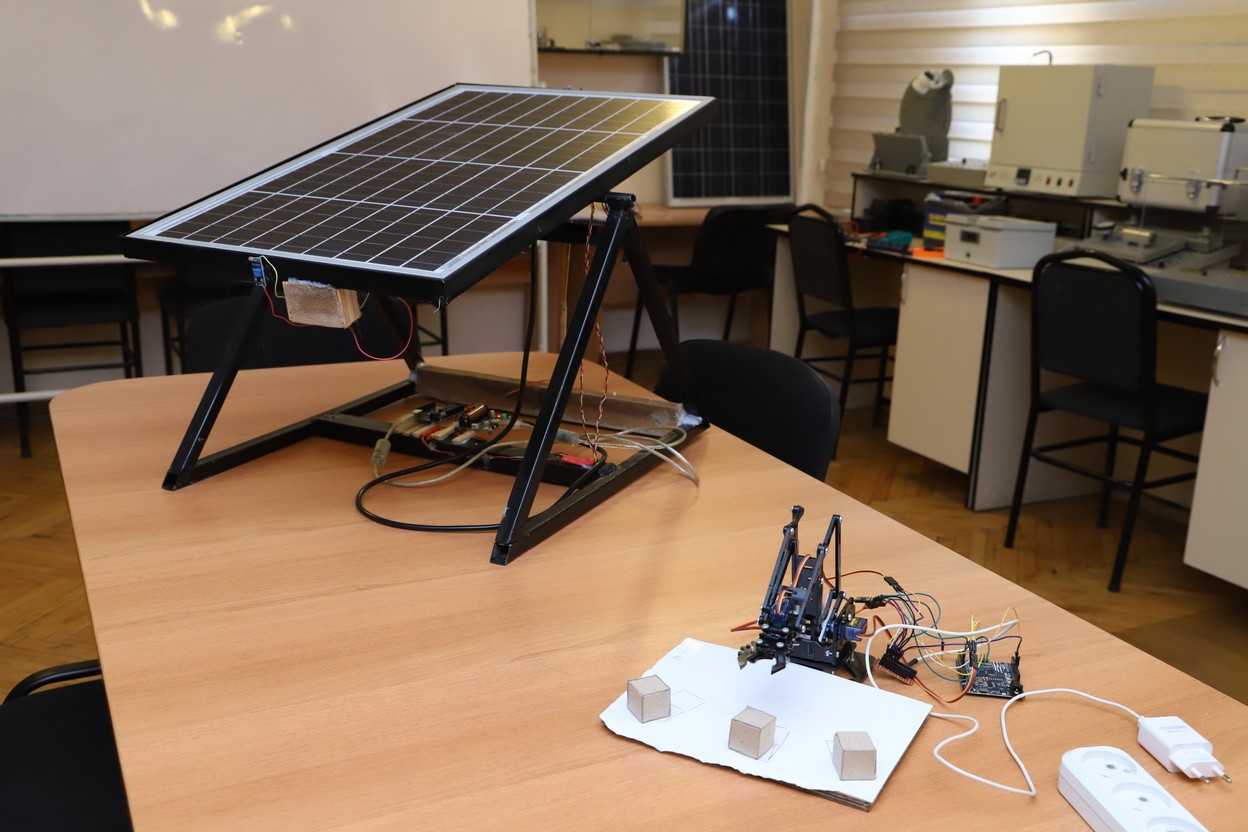
The developed robotic arm, featuring a modular and adaptive design, facilitates easy incorporation into existing production systems. Its kinematics and dynamics were precisely modeled and simulated to enhance its performance in terms of speed, load capacity, and range. The robot is programmed to automatically pick up loads from preset coordinates stored in its memory and relocate them. The project achieved slow arm movement, ensuring high precision and preventing damage to payloads. A programmable deceleration algorithm is used to control the arm's speed. During experiments, the current, voltage, and transverse pulse modulation for the robot's motor and Arduino controller were measured and tested. The payload mass was also measured to assess the robot's load capacity. An Arduino Uno was employed to implement and program the robot arm's algorithm, with significant slowing of movement achieved through code modifications. The code was written in Arduino IDE, and Matlab was used to plot the decelerating motion. Inverse kinematics was utilized to mathematically calculate the angles between the arm segments.
Rahim Ahmadov's dissertation focused on creating a "Phone Charging Converter with Automatic Solar Tracker," aimed at enhancing efficiency by using sensors to follow the sun's position throughout the day, automatically adjusting the solar panel's orientation. The primary benefit of this portable device is that it stores the collected energy in a battery, ensuring continuous operation. The project consists of two main components: the automatic sun tracker and the phone charger converter. The key advantage is its portability, with the energy collected being stored in the battery for constant use. Initially, a mechanical structure for the solar tracker automation was developed, followed by the assembly of the phone charger converter on that structure. Functionality was tested first in the laboratory and then in outdoor conditions. Experiments were conducted across different months and weather conditions, and the main parameters were calculated.











Copyright © Khazar University, 2026
 Facebook
Facebook  Instagram
Instagram  X
X  LinkedIn
LinkedIn  Telegram
Telegram  YouTube
YouTube